

This is designed to be a super small, open source, adaptable control board. Each module is arranged in units of 1.5cm squared, but can handle high power micro robotic actuators, such as my Mighty-Micro-Motors. Ideally this board can be reused and rebuilt for all sorts of small robots.
Architecture
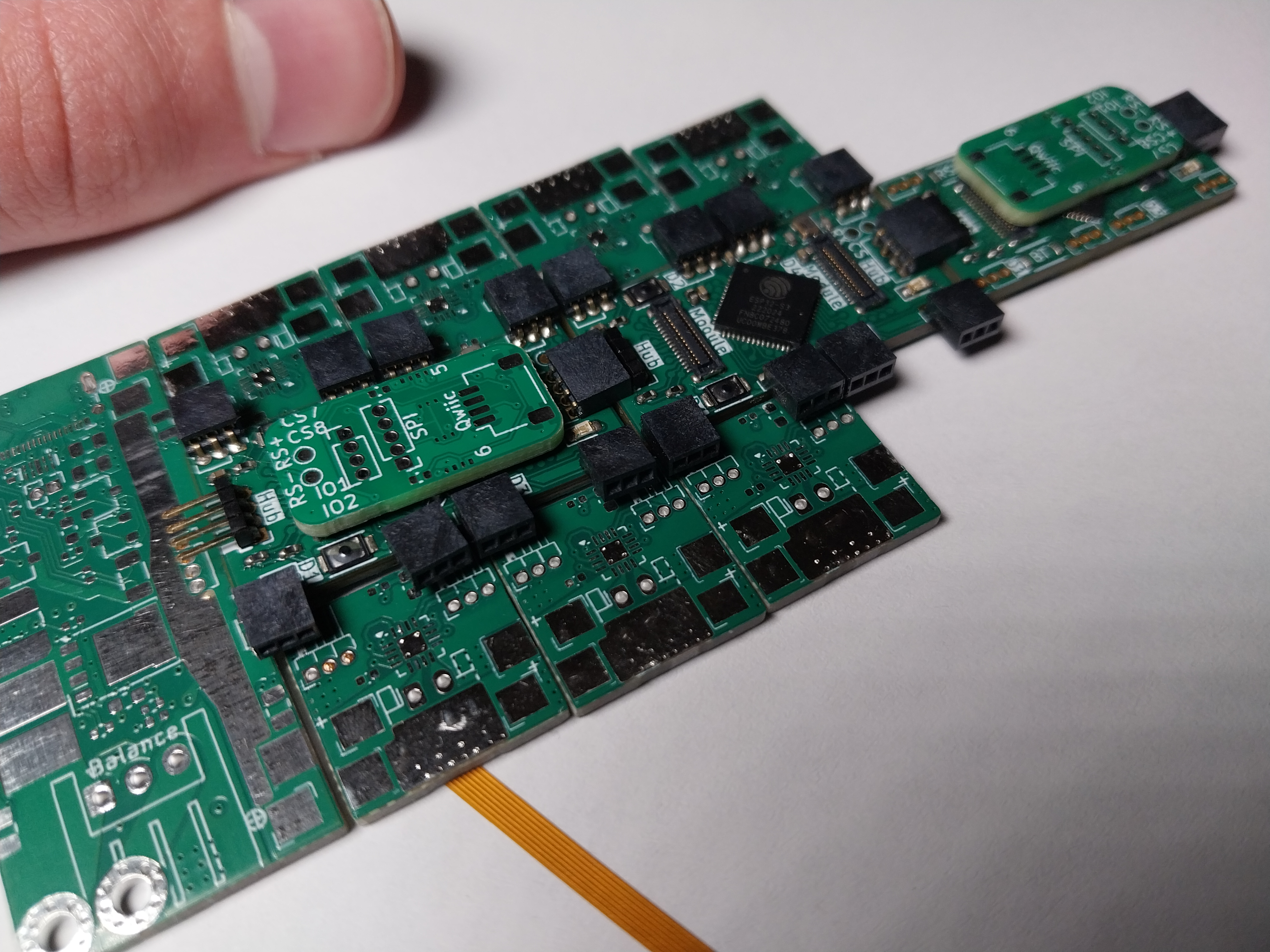
There are currently 6 types of sub-boards:
- Hubs (with a MCU on it, supports 2 or 4 drivers, 2 expansion cards, and a chain of peers)
- PSUs (typically only one board)
- Expansion Cards (vertical mezzanine connector boards for breaking out sensors and other interfaces)
- Drivers (Any high power driver)
- nanoSPI devices (Small 7-pin flex cable SPI devices, mostly for sensors)
- Passives (spacers, end caps, etc...)
The base unit for this project is 1.5 cm squared. The expansion cards and drivers should each be 1 unit, the Hubs 1x1 or 1x2, and the PSUs 3x1 units. For example, with a 12 motor board you would need 1 PSU, 3 1-by-2 hubs, and 12 drivers; the board would be 45x105mm. nanoSPI devices can be much smaller due to the 2.4mm wide flex cable, such as a 5mm diameter magnetic encoder.
Unfortunately I was unable to create a 45x15mm PSU for the first version, it had to be extended up by 5mm to fit the high current circuitry.
My initial idea was to have spring contacts to allow easy clip in clip out, but finding no connectors quite what I wanted and unable to manufacture my own, I went with 1.27mm pitch pin headers and micro Keystone edge board connectors for power.
Features
Required:
- Super Small modules
- Hubs with an mcu that can talk to its peers and a master
- Motor driver boards that can handle several amps
- Sensor ports with protocols like i2c and SPI
- Extendable architecture
- PSUs
- LED status lights
See the full project here!